Терминал (для работы с COM портом) под Windows.
Зачем понадобилось создавать еще одну программу терминал ???
На просторах интернета полно подобных программ ?!
Что есть, то есть !
Но есть маленькое НО, все дело в нюансах !
— Требуемый функционал был разбросан по нескольким программам и это было очень не удобно….
— Часть требуемых функций не было и вовсе…
— Часть программ банально падали в самый неподходящий момент….
— Часть функций реализованы с ошибками….
Так жить нельзя и работать тоже …. 
Значит надо создать свою программу, с необходимым функционалом.
Данный проект задумывался как вспомогательный для тестирования большого проекта связанного
с телеметрией. В проекте требовалось принимать и передавать данные через COM порт компьютера.
Проект готов и сдан. Программа осталась и продолжает использоваться по назначению, для отладки
разного рода устройств !
На текущий момент программа продолжает дорабатывается, исправляются ошибки, добавляются
новый функции.
В данной статье будут публиковаться все изменения и нововведения сделанные в программе.
Краткое описание программы.
Программа создана в среде Microsoft Studio 2008, на языке VB.
Работоспособность проверенна в следующих ОС: Windows XP, Windows 7-32/64Pro, Windows 11-64Pro.
Репозиторий программы представлен на GitHub, готовый бинарный файл(exe) в виде Zip архива.
Собранная программа представляет из себя один запускаемый файл.
Программа не требует установки и работает из любого места.
Программа не требует для запуска привилегий администратора.
Программа может:
1. Подключаться к любому com порту в системе.
2. Выставлять параметры работы com порта, включая нестандартные скорости работы порта
(при условии что драйвер windows поддерживает нестандартные скорости,
хотя как показала практика погрешность может быть очень большой.
Например: При заданной 250000 — в железе получаем 256000, ;(
увы точнее делитель не устанавливается….).
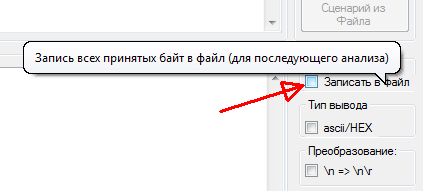
3. Производить запись принимаемых данных в файл.
Для этого необходимо поставить галку в Записать в файл,
будет создан файл с именем файла в виде текущей даты и времени и расширение log (например 05_06_2023_15_15_07.log)
в той же папке где находится сам терминал. Снятие и установка гадки приводит к созданию нового файла.
4. Передавать в порт строку с разными концовками в виде дополнительных кодов.
5. Циклически передавать в порт строку с заданным интервалом времени.
6. Передавать в порт файл.
7. Проиграть сценарий из файла (передача данных + задержка между данными).
8. Показывать состояние линий: CTS, DSR, RI, CD.
9. Изменять состояние линий: DTR, RST.
Программа пока не может:
1. Разбирать ESC последовательности.
2. Вести историю передаваемых строк.
3. Передавать в порт кода нажатых клавиш в окне приема и передачи.
4. Показывать ответы (RX от устройства) при проигрывании сценария из файла.
5. Вести в логах длинную историю (автоматическое укорачивание при достижении заданной длинны).
На текущий момент планов по развитию и доработки программы много.
Обычно в процесс работы с программой, во время отладки очередного устройства,
появляется необходимость в новом функционале.
Так в программу попадает новый функционал, продиктованный практикой.
При добавления нового функционала в программу, иногда добавляются и проявляются
глюки (по недосмотру), прошу отнестись с понимание
Глюки исправляются, и новая версия выкладывается в репозитарий.
Исходники на GiHub.
Текущая версия: Скачать (exe) в Zip архиве.
На основе данной программы была создана еще одна утилита для работы по протоколу PELCO-D,
для тестирования и управления камерами и поворотными платформами.
19-09-2023
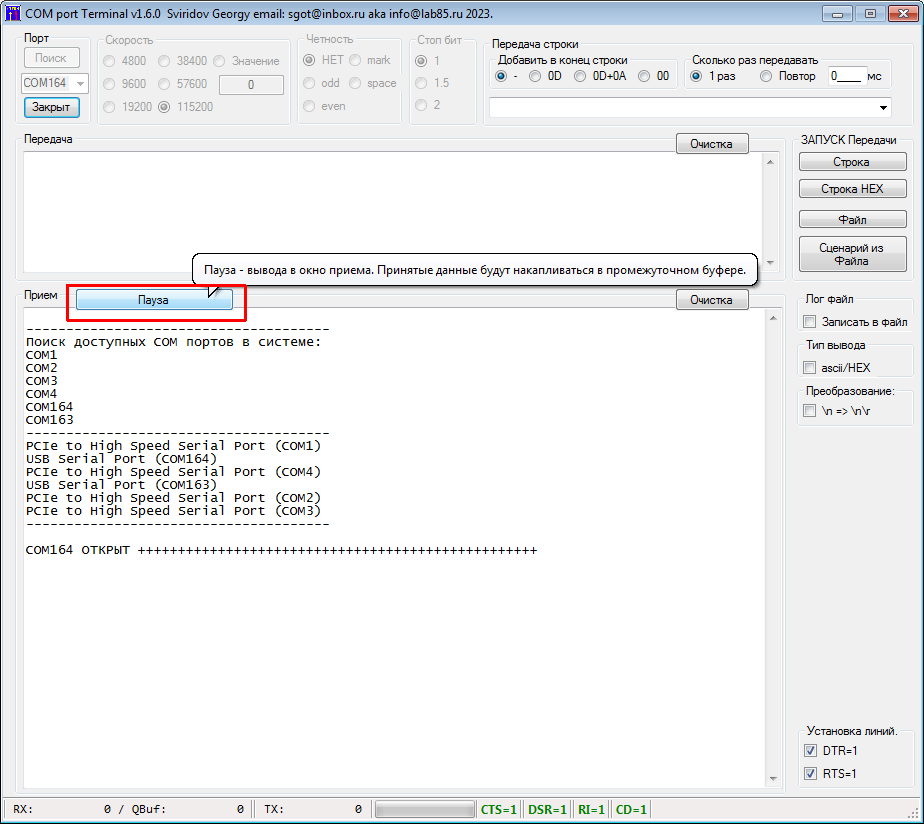
Текущая версия: v1.6.0.
[+] Новое: В приемном окне добавлена кнопка ПАУЗА, которая позволяет не выводить
принимаемый поток в окно терминала, пока не будет нажата повторно.
При этом данные продолжают приниматься и накапливаться во внутреннем буфере.
Данный функционал предназначен для просмотра части принятого потока при постоянной
передаче со стороны устройства.
[+] Исправление: Кнопка ПОИСК(СОМ портов в системе) выключается при открытии порта.
19-12-2022
Текущая версия: v1.5.0.
[+] Исправление: Замораживание интерфейса терминала при приеме потока данных.
12-12-2022
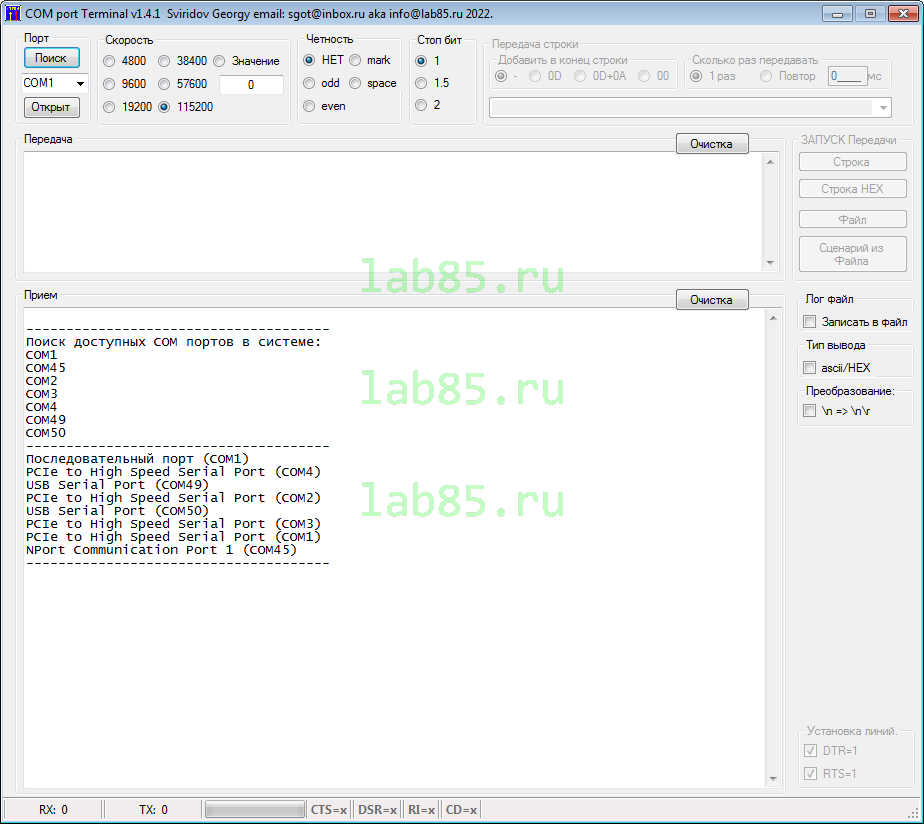
Текущая версия: v1.4.1.
[+] Исправление: Не верная полярность сигналов CTS/DSR/RI/CD.
[+] Исправление: Терминал вылетает с ошибкой при запуске, если в системе нет СОМ портов.
5-12-2022
Текущая версия: v1.4.0 (По просьбе коллеги был добавлен новый функционал).
[+] Новое: Вывод в строку статуса состояния сигналов CTS/DSR/RI/CD.
[+] Новое: Добавлена возможность изменения состояния сигналов RTS/DTR.
1-6-2022
Текущая версия: v1.3.8
[+] Исправление: Вывод в TXT и HEX строки.
3-8-2021
Текущая версия: v1.3.7
[+] Исправление: Зависание программы при отключении COM порта из системы (выдернули кабель…).
29-7-2021
Текущая версия: v1.3.6
[+] Исправление: Перепутаны STOP BIT 1.5 <-> 2.
22-7-2021
Текущая версия: v1.3.5
[+] Исправление: Не корректный вывод кодов \r \n.
8-6-2021
Текущая версия: v1.3.4
[+] Исправление: Подвисание интерфейса при приеме не отображаемых кодов (0x00-0x19).
[+] Исправление: Конвертации кодов \n -> \n\r.
3-12-2020
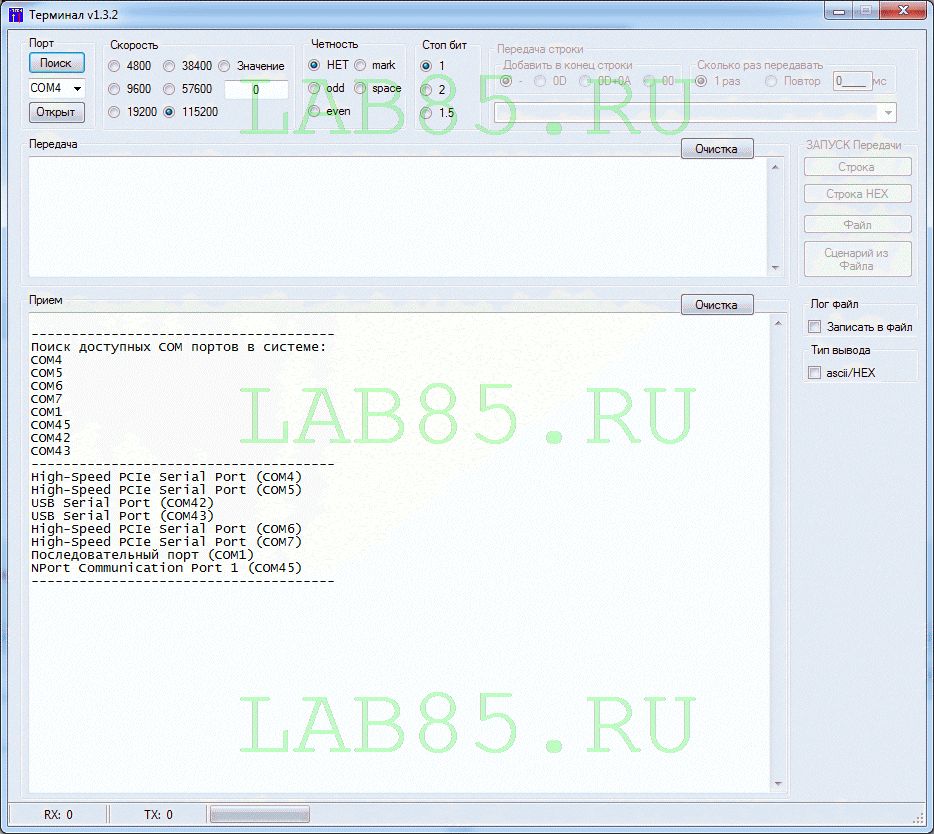
Текущая версия: v1.3.2
[+] Вывод подробного описания СОМ портов.
[+] Проигрывание сценария из текстового файла.
Пример сценария (Файл TXT), формат:
81 01 04 07 03 FF
> 100
81 01 04 07 02 FF
Где:
81 01 04 07 03 FF — значения байт в TXT-HEX формате отправляемых в СОМ порт.
> 100 — Формирование паузы 100 мс.
81 01 04 07 02 FF — значения байт в HEX формате отправляемых в СОМ порт.
[+] Перевод строки в TXT-HEX виде в байтовый массив и передача в СОМ порт.
15-05-2019
Версия: v1.2.2
[+] Добавлена история ввода передаваемых строк.
16-12-2018
Версия: v1.2.1
[+] Внесены изменения в интерфейс. Часть функций вынесены в окно приема.
[+] Добавлена функция Вкл/Выкл печати символа с кодом 0x0A.
0x0D + 0x0A -> 0x0D.
[+] Решено: При закрытии порта продолжалась передача в порт.
[+] Добавлена подсказка при наведении курсора на элементы управления.
[+] При запуске программы производится автоматический поиск СОМ портов в системе.
4-09-2018
Версия: v1.1.0
[+] Добавлена передача в порт кодов нажатых клавиш в окне приема и передачи.
Написать программу, управляющую устройством через COM-порт, для MS-DOS не так сложно.
С платформой Win32 дело обстоит сложнее. Но только на первый взгляд. Конечно напрямую работать с регистрами портов нельзя, Windows это не позволяет, зато можно не обращать внимания на тонкости различных реализаций (i8251, 16450, 16550A) и не возиться с обработкой прерываний.
Открытие порта[править]
С последовательными и параллельными портами в Win32 работают как с файлами. Для открытия порта используется функция CreateFile. Эта функция предоставляется Win32 API. Ее прототип выглядит так:
HANDLE CreateFile(
LPCTSTR lpFileName,
DWORD dwDesiredAccess,
DWORD dwShareMode,
LPSECURITY_ATTRIBUTES lpSecurityAttributes,
DWORD dwCreationDistribution,
DWORD dwFlagsAndAttributes,
HANDLE hTemplateFile
);
lpFileName[править]
Указатель на строку с именем открываемого или создаваемого файла. Формат этой строки может быть очень «хитрым». В частности можно указывать сетевые имена для доступа к файлам на других компьютерах. Можно открывать логические разделы или физические диски и работать в обход файловой системы.
Последовательные порты имеют имена «COM1», «COM2», «COM3», «COM4», «COM5», «COM6», «COM7», «COM8», «COM9». Для доступа к портам, чей номер больше 9, необходимо указывать имя порта как «\\.\COMx», где x — номер порта. Например, «\\.\COM72» (в нотации языка C/C++ строка будет выглядеть «\\\\.\\COM72»). Такой синтаксис подходит для любого номера порта. Точно так же они назывались в MS-DOS. Параллельные порты называются «LPT1», «LPT2» и так далее.
dwDesiredAccess[править]
Задает тип доступа к файлу. Возможно использование следующих значений:
0Опрос атрибутов устройства без получения доступа к нему.GENERIC_READФайл будет считываться.GENERIC_WRITEФайл будет записываться.GENERIC_READ|GENERIC_WRITEФайл будет и считываться и записываться.
dwShareMode[править]
Задает параметры совместного доступа к файлу. Коммуникационные порты нельзя делать разделяемыми, поэтому данный параметр должен быть равен 0.
lpSecurityAttributes[править]
Задает атрибуты защиты файла. Поддерживается только в Windows NT. Однако при работе с портами должен в любом случае равняться NULL.
dwCreationDistribution[править]
Управляет режимами автосоздания, автоусечения файла и им подобными. Для коммуникационных портов всегда должно задаваться OPEN_EXISTING.
dwFlagsAndAttributes[править]
Задает атрибуты создаваемого файла. Также управляет различными режимами обработки. При работе с портом этот параметр должен быть или равным 0, или FILE_FLAG_OVERLAPPED. Нулевое значение используется при синхронной работе с портом, а FILE_FLAG_OVERLAPPED при асинхронной, или, другими словами, при фоновой обработке ввода/вывода. Подробнее про асинхронный ввод/вывод я расскажу позже.
hTemplateFile[править]
Задает описатель файла-шаблона. При работе с портами всегда должен быть равен NULL.
При успешном открытии файла, в данном случае порта, функция возвращает дескриптор (HANDLE) файла. При ошибке [[|INVALID HANDLE VALUE]]. Код ошибки можно получитить вызвав функцию [[|GetLastError]].
Закрытие порта[править]
Открытый порт должен быть закрыт перед завершением работы программы. В Win32 закрытие объекта по его дескриптору выполняет функция CloseHandle:
BOOL CloseHandle( HANDLE hObject );
При успешном завершении функция возвращает не нулевое значение, при ошибке нуль.
Пример открытия/закрытия на языке C[править]
#include <windows.h> //. . . HANDLE Port; //. . . Port = CreateFile(L"\\\\.\\COM2", GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, 0, NULL); if (Port == INVALID_HANDLE_VALUE) { MessageBox(NULL, "Невозможно открыть последовательный порт", "Error", MB_OK); ExitProcess(1); } //. . . CloseHandle(Port); //. . .
В данном примере открывается порт СОМ2 для чтения и записи, используется синхронный режим обмена. Проверяется успешность открытия порта, при ошибке выводится сообщение и программа завершается. Если порт открыт успешно, то он закрывается.
Структура DCB[править]
Основные параметры последовательного порта описываются структурой DCB. Временные параметры — структурой COMMTIMEOUTS. Существует еще несколько информационных и управляющих структур, но они используются реже. Настройка порта заключается в заполнении управляющих структур и последующем вызове функций настройки.
Основную информацию содержит структура DCB:
typedef struct _DCB {
DWORD DCBlength; // sizeof(DCB)
DWORD BaudRate; // current baud rate
DWORD fBinary:1; // binary mode, no EOF check
DWORD fParity:1; // enable parity checking
DWORD fOutxCtsFlow:1; // CTS output flow control
DWORD fOutxDsrFlow:1; // DSR output flow control
DWORD fDtrControl:2; // DTR flow control type
DWORD fDsrSensitivity:1; // DSR sensitivity
DWORD fTXContinueOnXoff:1; // XOFF continues Tx
DWORD fOutX:1; // XON/XOFF out flow control
DWORD fInX:1; // XON/XOFF in flow control
DWORD fErrorChar:1; // enable error replacement
DWORD fNull:1; // enable null stripping
DWORD fRtsControl:2; // RTS flow control
DWORD fAbortOnError:1; // abort reads/writes on error
DWORD fDummy2:17; // reserved
WORD wReserved; // not currently used
WORD XonLim; // transmit XON threshold
WORD XoffLim; // transmit XOFF threshold
BYTE ByteSize; // number of bits/byte, 4-8
BYTE Parity; // 0-4=no,odd,even,mark,space
BYTE StopBits; // 0,1,2 = 1, 1.5, 2
char XonChar; // Tx and Rx XON character
char XoffChar; // Tx and Rx XOFF character
char ErrorChar; // error replacement character
char EofChar; // end of input character
char EvtChar; // received event character
WORD wReserved1; // reserved; do not use
} DCB;
Эта структура содержит почти всю управляющую информацию, которая в реальности располагается в различных регистрах последовательного порта.
DCBlength[править]
Задает длину, в байтах, структуры DCB. Используется для контроля корректности структуры при передаче ее адреса в функции настройки порта.
BaudRate[править]
Скорость передачи данных. Возможно указание следующих констант: CBR_110, CBR_300, CBR_600, CBR_1200, CBR_2400, CBR_4800, CBR_9600, CBR_14400, CBR_19200, CBR_38400, CBR_56000, CBR_57600, CBR_115200, CBR_128000, CBR_256000. Эти константы соответствуют всем стандартным скоростям обмена. На самом деле, это поле содержит числовое значение скорости передачи, а константы просто являются символическими именами. Поэтому можно указывать, например, и CBR_9600, и просто 9600. Однако рекомендуется указывать символические константы, поскольку при компиляции программы проверяется корректность их имен.
fBinary[править]
Включает двоичный режим обмена. Win32 не поддерживает недвоичный режим, поэтому данное поле всегда должно быть равно 1, или логической константе TRUE (что предпочтительней). В Windows 3.1, если это поле было равно FALSE, включался текстовый режим обмена. В этом режиме поступивший на вход порта символ, заданный полем EofChar, свидетельствовал о конце принимаемых данных.
fParity[править]
Включает режим контроля четности. Если это поле равно TRUE, то выполняется проверка четности, при ошибке, в вызывающую программу, выдается соответствующий код завершения.
fOutxCtsFlow[править]
Включает режим слежения за сигналом [[|CTS]]. Если это поле равно [[|TRUE]] и сигнал [[|CTS]] сброшен, передача данных приостанавливается до установки сигнала CTS. Это позволяет подключеному к компьютеру прибору приостановить поток передаваемой в него информации, если он не успевает ее обрабатывать.
fOutxDsrFlow[править]
Включает режим слежения за сигналом [[|DSR]]. Если это поле равно TRUE и сигнал DSR сброшен, передача данных прекращается до установки сигнала DSR.
fDtrControl[править]
Задает режим управления обменом для сигнала [[|DTR]]. Поле может принимать следующие значения:
- DTR_CONTROL_DISABLE Сигнал DTR снимается при открытии порта. У открытого порта может быть изменён функцией EscapeCommFunction.
- DTR_CONTROL_ENABLE Сигнал DTR устанавливается при открытии порта. У открытого порта может быть изменён функцией EscapeCommFunction.
- DTR_CONTROL_HANDSHAKE Сигнал DTR автоматически устанавливается/снимается в ходе работы с портом. Не может быть изменён функцией EscapeCommFunction.
fDsrSensitivity[править]
Задает чувствительсть коммуникационного драйвера к состоянию линии [[|DSR]]. Если это поле равно TRUE, то все принимаемые данные игнорируются драйвером (коммуникационный драйвер расположен в операционной системе), за исключением тех, которые принимаются при установленом сигнале DSR.
fTXContinueOnXoff[править]
Задает, прекращается ли передача при переполнении приемного буфера и передаче драйвером символа XoffChar. Если это поле равно TRUE, то передача продолжается, несмотря на то, что приемный буфер содержит более XoffLim символов и близок к переполнению, а драйвер передал символ XoffChar для приостановления потока принимаемых данных. Если поле равно FALSE, то передача не будет продолжена до тех пор, пока в приемном буфере не останется меньше XonLim символов и драйвер не передаст символ XonChar для возобновления потока принимаемых данных. Таким образом это поле вводит некую зависимость между управлением входным и выходным потоками информации.
fOutX[править]
Задает использование XON/XOFF управления потоком при передаче. Если это поле равно TRUE, то передача останавливается при приеме символа XoffChar, и возобновляется при приеме символа XonChar.
fInX[править]
Задает использование XON/XOFF управления потоком при приеме. Если это поле равно TRUE, то драйвер передает символ XoffChar, когда в приемном буфере находится более XoffLim, и XonChar, когда в приемном буфере остается менее XonLim символов.
fErrorChar[править]
Указывает на необходимость замены символов с ошибкой четности на символ задаваемый полем ErrorChar. Если это поле равно TRUE, и поле fParity равно TRUE, то выполняется замена.
fNull[править]
Определяет действие выполняемое при приеме нулевого байта. Если это поле TRUE, то нулевые байты отбрасываются при передаче.
fRtsControl[править]
Задает режим управления потоком для сигнала RTS. Поле может принимать следующие значения:
- RTS_CONTROL_DISABLE Сигнал RTS снимается при открытии порта. У открытого порта может быть изменён функцией EscapeCommFunction.
- RTS_CONTROL_ENABLE Сигнал RTS устанавливается при открытии порта. У открытого порта может быть изменён функцией EscapeCommFunction.
- RTS_CONTROL_HANDSHAKE Сигнал RTS автоматически устанавливается/снимается в ходе работы с портом. Не может быть изменён функцией EscapeCommFunction. Сигнал RTS устанавливается, когда приемный буфер заполнен менее, чем на половину, и снимается, когда буфер заполняется более чем на три четверти.
- RTS_CONTROL_TOGGLE Задаёт, что сигнал RTS установлен, когда есть данные для передачи. Когда все символы из передающего буфера переданы, сигнал снимается.
fAbortOnError[править]
Задает игнорирование всех операций чтения/записи при возникновении ошибки. Если это поле равно TRUE, драйвер прекращает все операции чтения/записи для порта при возникновении ошибки. Продолжать работать с портом можно будет только после устранения причины ошибки и вызова функции ClearCommError.
fDummy2[править]
Зарезервировано и не используется.
wReserved[править]
Не используется, должно быть установлено в 0.
XonLim[править]
Задает минимальное число символов в приемном буфере перед посылкой символа XON.
XoffLim[править]
Определяет максимальное количество байт в приемном буфере перед посылкой символа XOFF. Максимально допустимое количество байт в буфере вычисляется вычитанием данного значения из размера приемного буфера в байтах.
ByteSize[править]
Определяет число информационных бит в передаваемых и принимаемых байтах. Число информационных бит может быть в диапазоне от 4 до 8.
Parity[править]
Определяет выбор схемы контроля четности. Данное поле должно содержать одно из следующих значений:
- EVENPARITY Дополнение до четности
- MARKPARITY Бит четности всегда 1
- NOPARITY Бит четности отсутствует
- ODDPARITY Дополнение до нечетности
- SPACEPARITY Бит четности всегда 0
StopBits[править]
Задает количество стоповых бит. Поле может принимать следующие значения:
- ONESTOPBIT Один стоповый бит
- ONE5STOPBIT Полтора стоповых бита
- TWOSTOPBITS Два стоповых бита
XonChar[править]
Задает символ XON используемый как для приема, так и для передачи. Обычно 0x11 (17).
XoffChar[править]
Задает символ XOFF используемый как для приема, так и для передачи. Обычно 0x13 (19).
ErrorChar[править]
Задает символ, использующийся для замены символов с ошибочной четностью.
EofChar[править]
Задает символ, использующийся для сигнализации о конце данных.
EvtChar[править]
Задает символ, использующийся для сигнализации о событии.
wReserved1[править]
Зарезервировано и не используется.
Замечания[править]
Если структура DCB содержит конфигурацию для последовательного порта, совместимого с 8250, то к значениям полей ByteSize и StopBits применяются следующие ограничения:
- Количество информационных бит должно быть от
5до8. - Не допускается использование
5информационных бит с2стоповыми битами, также как6,7или8информационных бит с1,5стоповыми битами.
Заполнение структуры DCB[править]
Структура COMMTIMEOUTS[править]
winbase.h
typedef struct _COMMTIMEOUTS { DWORD ReadIntervalTimeout; /* Maximum time between read chars. */ DWORD ReadTotalTimeoutMultiplier; /* Multiplier of characters. */ DWORD ReadTotalTimeoutConstant; /* Constant in milliseconds. */ DWORD WriteTotalTimeoutMultiplier; /* Multiplier of characters. */ DWORD WriteTotalTimeoutConstant; /* Constant in milliseconds. */ } COMMTIMEOUTS,*LPCOMMTIMEOUTS;
ReadIntervalTimeout — время в миллисекундах, задающее максимальное время, для интервала между поступлением двух символов по линии связи. Если интервал между поступлением каких-либо двух символов будет больше этой величины, операция ReadFile завершается и любые буферизированные данные возвращаются.
Чтобы операция ReadFile немедленно возвращала управление со всеми полученными данными (асинхронный режим) следует задавать следующие значения:
ReadIntervalTimeout=0xFFFFFFFF; ReadTotalTimeoutConstant=0; ReadTotalTimeoutMultiplier=0;
ReadTotalTimeoutMultiplier — Множитель, используемый, чтобы вычислить полный период времени простоя для операций чтения, в миллисекундах. Для каждой операции чтения, это значение умножается на затребованное число байтов, которые читаются.
ReadTotalTimeoutConstant — Константа, используемая, чтобы вычислить полный (максимальный) период времени простоя для операций чтения, в миллисекундах. Для каждой операции чтения, это значение добавляется к произведению члена структуры ReadTotalTimeoutMultiplier и прочитанного числа байтов.
Значение нуля и для члена ReadTotalTimeoutMultiplier, и для члена ReadTotalTimeoutConstant указывает, что полное время простоя не используются для операций чтения.
WriteTotalTimeoutMultiplier — Множитель, используемый, чтобы вычислить полный период времени простоя для операций записи, в миллисекундах. Для каждой операции записи, это значение умножается на число записываемых байтов.
WriteTotalTimeoutConstant — Константа, используемая, чтобы вычислить полный период времени простоя для операций записи, в миллисекундах. Для каждой операции записи, это значение добавляется к произведению члена структуры WriteTotalTimeoutMultiplier и записанного числа байтов.
Значение нуля и для члена WriteTotalTimeoutMultiplier, и для члена WriteTotalTimeoutConstant указывает, что полное время простоя не используются для операций записи.
Заполнение структуры COMMTIMEOUTS[править]
Вариант 1: (максимальная задержка при чтении и записи = TIMEOUT)
COMMTIMEOUTS CommTimeOuts; CommTimeOuts.ReadIntervalTimeout = 0xFFFFFFFF; CommTimeOuts.ReadTotalTimeoutMultiplier = 0; CommTimeOuts.ReadTotalTimeoutConstant = TIMEOUT; CommTimeOuts.WriteTotalTimeoutMultiplier = 0; CommTimeOuts.WriteTotalTimeoutConstant = TIMEOUT;
Вариант 2: Инициализация значениями (без задержки при чтении)
COMMTIMEOUTS CommTimeOuts={0xFFFFFFFF,0,0,0,1500};
Пример настройки порта[править]
Структура COMMPORT[править]
Стандартный диалог настройки порта[править]
Для настройки параметров COM — порта может быть вызвано штатное окно Windows. Вызов осуществляется функцией CommConfigDialog(), которая в качестве параметров принимает имя настраиваемого порта, хендл родительского окна и указатель на структуру COMMCONFIG.
Следует отметить, что для корректного вызова окна, структура COMMCONFIG должна быть заполнена значениями заранее.
Настройку структуры можно выполнить вручную или при помощи функции GetCommConfig().
Например:
/* Получение существующих настроек */ unsigned long new_size = 0; if (!GetCommConfig(port->handle, &port->settings,&new_size)) goto error; /* Вызов окна и установка новых параметров */ if (CommConfigDialog(port->name, 0, &port->settings)) { if (SetCommConfig(port->handle, &port->settings, port->settings.dwSize)) return 1; goto error; }
Выделение памяти для структуры COMMPORT[править]
Прием и передача данных[править]
Прием и передача данных для последовательного порта может выполнятся в синхронном или асинхронном режимах. Асинхронный режим позволяет реализовать работу по событиям, в то время как синхронный лишен этой возможности, но является более простым в реализации.
Для работы в синхронном режиме, порт должен быть открыт следующим образом:
CreateFile("COM1", GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, 0, NULL);
Предпоследний параметр dwFlagsAndAttributes должен быть равен 0.
После успешного открытия порта, данные могут быть считаны или записаны при помощи функций ReadFile() и WriteFile().
HANDLE port = CreateFile("COM1", GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, 0, NULL); unsigned char dst[1024] = {0}; unsigned long size = sizeof(dst); if(port!= INVALID_HANDLE_VALUE) if(ReadFile(port,dst,size, &size,0)) printf("\nRead %d bytes",size);
Функция ReadFile/WriteFile осуществляет чтение/запись из файла (устройства) начиная с текущей позиции после окончания чтения обновляет указатель в файле.
BOOL ReadFile( HANDLE hFile, // хендл файла LPVOID lpBuffer, //указатель на буфер DWORD nNumberOfBytesToRead, // размер данных LPDWORD lpNumberOfBytesRead, //размер считанных данных LPOVERLAPPED lpOverlapped //структура OVERLAPPED );
Недостатком этого способа является то, что вызывая функцию ReadFile(), мы не знаем есть ли данные для чтения. Можно циклически проверять их наличие, но это приводит к дополнительным расходам времени ЦП.
Поэтому на практике часто удобней использовать асинхронный режим. Для этого при вызове функции CreateFile() параметр dwFlagsAndAttributes должен быть равен FILE_FLAG_OVERLAPPED.
CreateFile("COM1", GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_FLAG_OVERLAPPED, NULL);
Далее, необходимо настроить реакцию порта на события при помощи функции SetCommMask() и используя функции WaitCommEvent() и WaitForSingleObject() ожидать событие или тайм аут.
Например:
const int READ_TIME = 100; OVERLAPPED sync = {0}; int reuslt = 0; unsigned long wait = 0, read = 0, state = 0; /* Создаем объект синхронизации */ sync.hEvent = CreateEvent(NULL,TRUE,FALSE,NULL); /* Устанавливаем маску на события порта */ if(SetCommMask(port, EV_RXCHAR)) { /* Связываем порт и объект синхронизации*/ WaitCommEvent(port, &state, &sync); /* Начинаем ожидание данных*/ wait = WaitForSingleObject(sync.hEvent, READ_TIME); /* Данные получены */ if(wait == WAIT_OBJECT_0) { /* Начинаем чтение данных */ ReadFile(port, dst, size, &read, &sync); /* Ждем завершения операции чтения */ wait = WaitForSingleObject(sync.hEvent, READ_TIME); /* Если все успешно завершено, узнаем какой объем данных прочитан */ if(wait == WAIT_OBJECT_0) if(GetOverlappedResult(port, &sync, &read, FALSE)) reuslt = read; } } CloseHandle(sync.hEvent);
Сброс порта[править]
Пример настройки порта и выполнения чтения/записи данных[править]
Код для работы с COM-портом. Многострадальный, соответственно относительно простой и понятный, при этом обходит основные подводные камни. Надеюсь, может быть полезен.
tty.h[править]
#ifndef TTY_H #define TTY_H #define NOMINMAX //иначе API windows определит макросы min и max, конфликтующие с std::max и std::min в vector #include <windows.h> #include <vector> #include <string> using namespace std; struct TTY { TTY(); virtual ~TTY(); bool IsOK() const; void Connect(const string& port, int baudrate); void Disconnect(); virtual void Write(const vector<unsigned char>& data); virtual void Read(vector<unsigned char>& data); HANDLE m_Handle; }; struct TTYException { }; #endif
tty.cpp[править]
#include "tty.h" #include <iostream> #include <assert.h> #include <windows.h> using namespace std; static int TIMEOUT = 1000; TTY::TTY() { m_Handle = INVALID_HANDLE_VALUE; } TTY::~TTY() { Disconnect(); } bool TTY::IsOK() const { return m_Handle != INVALID_HANDLE_VALUE; } void TTY::Connect(const string& port, int baudrate) { Disconnect(); m_Handle = CreateFile( port.c_str(), GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL); if(m_Handle == INVALID_HANDLE_VALUE) { throw TTYException(); } SetCommMask(m_Handle, EV_RXCHAR); SetupComm(m_Handle, 1500, 1500); COMMTIMEOUTS CommTimeOuts; CommTimeOuts.ReadIntervalTimeout = 0xFFFFFFFF; CommTimeOuts.ReadTotalTimeoutMultiplier = 0; CommTimeOuts.ReadTotalTimeoutConstant = TIMEOUT; CommTimeOuts.WriteTotalTimeoutMultiplier = 0; CommTimeOuts.WriteTotalTimeoutConstant = TIMEOUT; if(!SetCommTimeouts(m_Handle, &CommTimeOuts)) { CloseHandle(m_Handle); m_Handle = INVALID_HANDLE_VALUE; throw TTYException(); } DCB ComDCM; memset(&ComDCM,0,sizeof(ComDCM)); ComDCM.DCBlength = sizeof(DCB); GetCommState(m_Handle, &ComDCM); ComDCM.BaudRate = DWORD(baudrate); ComDCM.ByteSize = 8; ComDCM.Parity = NOPARITY; ComDCM.StopBits = ONESTOPBIT; ComDCM.fAbortOnError = TRUE; ComDCM.fDtrControl = DTR_CONTROL_DISABLE; ComDCM.fRtsControl = RTS_CONTROL_DISABLE; ComDCM.fBinary = TRUE; ComDCM.fParity = FALSE; ComDCM.fInX = FALSE; ComDCM.fOutX = FALSE; ComDCM.XonChar = 0; ComDCM.XoffChar = (unsigned char)0xFF; ComDCM.fErrorChar = FALSE; ComDCM.fNull = FALSE; ComDCM.fOutxCtsFlow = FALSE; ComDCM.fOutxDsrFlow = FALSE; ComDCM.XonLim = 128; ComDCM.XoffLim = 128; if(!SetCommState(m_Handle, &ComDCM)) { CloseHandle(m_Handle); m_Handle = INVALID_HANDLE_VALUE; throw TTYException(); } } void TTY::Disconnect() { if(m_Handle != INVALID_HANDLE_VALUE) { CloseHandle(m_Handle); m_Handle = INVALID_HANDLE_VALUE; } } void TTY::Write(const vector<unsigned char>& data) { if(m_Handle == INVALID_HANDLE_VALUE) { throw TTYException(); } DWORD feedback; if(!WriteFile(m_Handle, &data[0], (DWORD)data.size(), &feedback, 0) || feedback != (DWORD)data.size()) { CloseHandle(m_Handle); m_Handle = INVALID_HANDLE_VALUE; throw TTYException(); } // In some cases it's worth uncommenting //FlushFileBuffers(m_Handle); } void TTY::Read(vector<unsigned char>& data) { if(m_Handle == INVALID_HANDLE_VALUE) { throw TTYException(); } DWORD begin = GetTickCount(); DWORD feedback = 0; unsigned char* buf = &data[0]; DWORD len = (DWORD)data.size(); int attempts = 3; while(len && (attempts || (GetTickCount()-begin) < (DWORD)TIMEOUT/3)) { if(attempts) attempts--; if(!ReadFile(m_Handle, buf, len, &feedback, NULL)) { CloseHandle(m_Handle); m_Handle = INVALID_HANDLE_VALUE; throw TTYException(); } assert(feedback <= len); len -= feedback; buf += feedback; } if(len) { CloseHandle(m_Handle); m_Handle = INVALID_HANDLE_VALUE; throw TTYException(); } } using namespace std; int main(int argc, char *argv[]) { TTY tty; tty.Connect("COM4",9600); for(int i=0;i<1000;i++) { std::vector<unsigned char> the_vectsor; the_vectsor.push_back(5); tty.Read(the_vectsor); std::cout << (char)(the_vectsor[0]); //output text } system("PAUSE"); return EXIT_SUCCESS; }
Sometimes we require to communicate with an external device like a printer, microcontroller board or any serial device using the serial port of a windows machine. There is a lot of serial application available like Hercules, HyperTerminal, Docklight, ..etc.
We can use any one of them for serial communication but sometimes we require to create our own custom serial application for communication. In windows, it is easy to create the custom serial application using the win32 API.
In this blog post, we will learn serial port programming using the Win32 API. In Windows, serial port programming is very easy, MSDN provide all the required win32 API information which require for the serial port programming.
You can also see the below articles that how to change the properties of com-port like baud rate, parity using the Windows API.
- Change properties of COM Port Using win32 API
- Get COM PORT of USB Serial Device using the VID and PID
Finding COM port Number of a Device
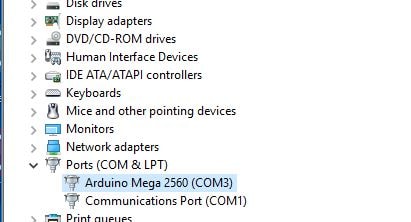
In windows, the serial device will display in com port section of device manager with name as COM1, COM2, COM3, COM4.. etc. Generally, COM1 and COM2 refer to the hardware serial ports present in the PC and another com port number is export when any serial device or USB to serial device attached to PC. It also possible that com id could be virtual ( for example static virtual com port).
In my laptop, I have attached an Arduino board (Atmega 2560) and its COM id would be shown in com port section (Control Panel > Device Manager > Ports).
Compilers and IDE’s used
Here I have used Visual Studio 2013. You can also use MinGW (Minimalist GNU for Windows) an Open Source programming tool. Here I am assuming that you know how to create the console application using the visual studio and familiar with win32 API.
Opening a Serial Port
In Windows using the CreateFile(), we can open the serial port. The CreateFile() is a Win32 API that creates or opens a file or I/O device.
On success CreateFile() returns a handle that can be used to access the file or device depending on the flags and attributes specified.
HANDLE CreateFile(
LPCTSTR lpFileName, // pointer to name of the file
DWORD dwDesiredAccess, // access (read-write) mode
DWORD dwShareMode, // share mode
LPSECURITY_ATTRIBUTES lpSecurityAttributes,
// pointer to security attributes
DWORD dwCreationDisposition, // how to create
DWORD dwFlagsAndAttributes, // file attributes
HANDLE hTemplateFile // handle to file with attributes to
// copy
);
Closing a Serial Port
You should remember that after opening the com port using the CreateFile(), you have to close it by calling the CloseHandle() otherwise it will be unavailable to other applications.
BOOL CloseHandle( HANDLE hObject );
On success CloseHandle() returns zero.
Serial port communication Application
Let see an example code where I am talking with a Mega2560 Arduino device. I have written a small code for mega2560 in which it receives serial data. If received data is “aticleworld” then it will send a message “Welcome to AticleWorld !” or otherwise it will send the message “Please Send Correct Message”.
Mega2560 serial code,
#include <SoftwareSerial.h>
void setup()
{
// initialize serial ports
Serial.begin(9600); // USB serial port 0
}
void loop()
{
String msg = "";
// check for data byte on USB serial port
if (Serial.available())
{
// get byte from USB serial port
while(Serial.available())
{
msg = Serial.readString();// read the incoming data as string
}
if( msg == "aticleworld")
{
//Send data to usb serial port
Serial.write(" Welcome to AticleWorld !");
}
else
{
//Send data to usb serial port
Serial.write("Please Send Correct Message");
}
}
}
You can purchase Mega2560 from Amazon, Click here

![]()
Serial Application for the console,
In the below console application, I am using the win32 API to open the com port and sending the data to the open COM port. See the below video where I have downloaded the Arduino code in the Arduino board and communicating with this board using the console application.
#include "stdafx.h"
#include <Windows.h>
#include <stdio.h>
#include <string.h>
int main(void)
{
HANDLE hComm; // Handle to the Serial port
BOOL Status; // Status
DCB dcbSerialParams = { 0 }; // Initializing DCB structure
COMMTIMEOUTS timeouts = { 0 }; //Initializing timeouts structure
char SerialBuffer[64] = { 0 }; //Buffer to send and receive data
DWORD BytesWritten = 0; // No of bytes written to the port
DWORD dwEventMask; // Event mask to trigger
char ReadData; //temperory Character
DWORD NoBytesRead; // Bytes read by ReadFile()
unsigned char loop = 0;
wchar_t pszPortName[10] = { 0 }; //com port id
wchar_t PortNo[20] = { 0 }; //contain friendly name
//Enter the com port id
printf_s("Enter the Com Port: ");
wscanf_s(L"%s", pszPortName, (unsigned)_countof(pszPortName));
swprintf_s(PortNo, 20, L"\\\\.\\%s", pszPortName);
//Open the serial com port
hComm = CreateFile(PortNo, //friendly name
GENERIC_READ | GENERIC_WRITE, // Read/Write Access
0, // No Sharing, ports cant be shared
NULL, // No Security
OPEN_EXISTING, // Open existing port only
0, // Non Overlapped I/O
NULL); // Null for Comm Devices
if (hComm == INVALID_HANDLE_VALUE)
{
printf_s("\n Port can't be opened\n\n");
goto Exit2;
}
//Setting the Parameters for the SerialPort
dcbSerialParams.DCBlength = sizeof(dcbSerialParams);
Status = GetCommState(hComm, &dcbSerialParams); //retreives the current settings
if (Status == FALSE)
{
printf_s("\nError to Get the Com state\n\n");
goto Exit1;
}
dcbSerialParams.BaudRate = CBR_9600; //BaudRate = 9600
dcbSerialParams.ByteSize = 8; //ByteSize = 8
dcbSerialParams.StopBits = ONESTOPBIT; //StopBits = 1
dcbSerialParams.Parity = NOPARITY; //Parity = None
Status = SetCommState(hComm, &dcbSerialParams);
if (Status == FALSE)
{
printf_s("\nError to Setting DCB Structure\n\n");
goto Exit1;
}
//Setting Timeouts
timeouts.ReadIntervalTimeout = 50;
timeouts.ReadTotalTimeoutConstant = 50;
timeouts.ReadTotalTimeoutMultiplier = 10;
timeouts.WriteTotalTimeoutConstant = 50;
timeouts.WriteTotalTimeoutMultiplier = 10;
if (SetCommTimeouts(hComm, &timeouts) == FALSE)
{
printf_s("\nError to Setting Time outs");
goto Exit1;
}
printf_s("\n\nEnter your message: ");
scanf_s("%s", SerialBuffer, (unsigned)_countof(SerialBuffer));
//Writing data to Serial Port
Status = WriteFile(hComm,// Handle to the Serialport
SerialBuffer, // Data to be written to the port
sizeof(SerialBuffer), // No of bytes to write into the port
&BytesWritten, // No of bytes written to the port
NULL);
if (Status == FALSE)
{
printf_s("\nFail to Written");
goto Exit1;
}
//print numbers of byte written to the serial port
printf_s("\nNumber of bytes written to the serail port = %d\n\n", BytesWritten);
//Setting Receive Mask
Status = SetCommMask(hComm, EV_RXCHAR);
if (Status == FALSE)
{
printf_s("\nError to in Setting CommMask\n\n");
goto Exit1;
}
//Setting WaitComm() Event
Status = WaitCommEvent(hComm, &dwEventMask, NULL); //Wait for the character to be received
if (Status == FALSE)
{
printf_s("\nError! in Setting WaitCommEvent()\n\n");
goto Exit1;
}
//Read data and store in a buffer
do
{
Status = ReadFile(hComm, &ReadData, sizeof(ReadData), &NoBytesRead, NULL);
SerialBuffer[loop] = ReadData;
++loop;
}
while (NoBytesRead > 0);
--loop; //Get Actual length of received data
printf_s("\nNumber of bytes received = %d\n\n", loop);
//print receive data on console
printf_s("\n\n");
int index = 0;
for (index = 0; index < loop; ++index)
{
printf_s("%c", SerialBuffer[index]);
}
printf_s("\n\n");
Exit1:
CloseHandle(hComm);//Closing the Serial Port
Exit2:
system("pause");
return 0;
}
Recommended Posts for you:
- Best 5 C Books.
- Get COM PORT of USB Serial Device using the VID and PID.
- Reading And Writing Windows Registry Using WinAPI
- Install the port monitor silently without user interaction.
- C++ Interview Questions with Answers.
- C-Sharp Interview Questions.
- Python Interview Questions with Answer.
- Memory Layout in C.
- 100 C interview questions, your interviewer might ask.
- C Interview Questions for the experience.
- 10 questions about dynamic memory allocation
- File handling in C, in few hours.
Reference: https://docs.microsoft.com/en-us/windows/desktop/api/fileapi/nf-fileapi-createfilea
Часто бывает необходимо, чтобы работа с устройством поддерживалась как в windows, так и в linux. В моем случае нужно было обеспечить работу com-порта в приложении, написанном на с/с++ с использованием кроссплатформенной библиотеки QT. Штатной поддержки программирования портов в QT нет (да и ни к чему это). Поэтому в win32 для работы с портом будем использовать средства WinAPI. В linux системах же, как известно для работы с устройствами используются специальные файлы.
Итак, взяв на вооружение всем знакомый gcc и его windows-аналог mingw, напишем нехитрый код.
Код будет довольно таки искусственным, т.к. ставится цель не более, чем показать принципы работы с com-портами в двух операционках. Для управления компилятором будем использовать директивы определения компилятора и ОС (__MINGW32__ и __linux). Com-портом в нашем случае является устройство dev/ttyS0 и COM1.
Инициализация
#ifdef __MINGW32__
#include <windows.h>
#endif
#ifdef __linux
#include <sys/types.h>
#include <fcntl.h>
#endif
#include <stdio.h>
int main() {
#ifdef __MINGW32__
HANDLE hSerial = CreateFile
("COM1",GENERIC_READ | GENERIC_WRITE,0,NULL,OPEN_EXISTING,0,NULL);
if (hSerial == INVALID_HANDLE_VALUE) {
printf("Error opening port\r\n");
return -1;
}
#endif
#ifdef __linux
int fd = open("/dev/ttyS0", O_RDWR | O_NOCTTY );
if (fd <0) {
printf("Error opening port\n");
return -1;
}
#endif
...
Здесь в win32 используется функция CreateFile, параметры по ссылке в коде. Функция возвращает хендл на на устройство, в которым мы дальше будем работать. Аналогично работает и open в linux.
Запись
char * data; // данные записи в порт
data[0] = 0x01;
#ifdef __MINGW32__
DWORD dwBytesWrite = 0; // кол-во записанных байтов
if(!WriteFile
(hSerial, data, 1, &dwBytesWrite, NULL)){
printf("write error\r\n");
}
#endif
#ifdef __linux
int iOut = write(fd, data, 1);
if (iOut < 0){
printf("write error\n");
}
#endif
Для записи в порт используем ранее возвращенный хендл и пишем соответствующими функциями.
Процедура чтения выглядит аналогично.
Чтение
char * buffer;
#ifdef __MINGW32__
if(!ReadFile
(hSerial, buffer, 1, &dwBytesWrite, NULL)){
printf("read error\r\n");
}
#endif
#ifdef __linux
int iOut = read(fd, buffer, 1);
if (iOut < 0){
printf("read error\n");
}
#endif
Закрытие порта
#ifdef __MINGW32__
CloseHandle(hSerial);
#endif
#ifdef __linux
close(fd);
#endif
Кроме того, существуют функции для настройки самих портов. Об их использовании я, возможно, напишу в следующих статьях. В нашем примере все работает по стандартным настройкам системы.
Осталось дело за малым — скомпилировать код под каждую из ОС.
Надеюсь, что эта практика пригодится кому-то, кроме меня самого.
Приятного си-программирования!
Ком порт – это важное устройство, которое используется для обмена данными между компьютером и внешними устройствами. В Windows этот порт может быть использован для подключения различных устройств, таких как модемы, принтеры и сканеры. В данной статье мы рассмотрим основные шаги по настройке и использованию ком порта в операционной системе Windows.
Первым шагом для работы с ком портом является подключение устройства к компьютеру. Обычно для этого используется специальный кабель, который один конец которого подключается к устройству, а другой – к ком порту на компьютере. После подключения кабеля следует убедиться, что устройство правильно распознается системой. Для этого можно открыть меню «Устройства и принтеры» в панели управления и проверить наличие нового устройства.
После успешного подключения устройства следует проверить состояние ком порта. Для этого можно воспользоваться специальными программами или использовать стандартные средства операционной системы. Если ком порт активен и работает корректно, то можно приступить к настройке и использованию устройства. Для этого может потребоваться установка драйверов и настройка параметров ком порта в программе, которая будет использовать устройство.
Важно помнить, что работа с ком портом требует некоторых технических навыков и знаний. Если у вас возникают сложности или необходима дополнительная информация, рекомендуется обратиться к документации устройства или обратиться за помощью к специалисту.
Независимо от того, какое устройство вы используете и для какой цели, работа с ком портом может быть интересной и полезной. В данной статье мы рассмотрели лишь базовые шаги по настройке и использованию ком порта в Windows. Если вы хотите расширить свои знания и углубиться в данную тему, рекомендуется изучить специальную литературу и провести практические упражнения. Желаем вам успехов в работе с ком портом!
Содержание
- Что такое ком порт и зачем он нужен?
- Подключение устройства через ком порт
- Установка и настройка драйверов для ком порта
Что такое ком порт и зачем он нужен?
Ком порты были разработаны для обмена данными между компьютером и другими устройствами, такими как модемы, принтеры, сканеры и другие периферийные устройства. Ком порт позволяет передавать данные по одному биту за раз, а не по нескольким битам, как это происходит в USB-портах или Wi-Fi.
Ком порты имеют несколько особенностей, которые делают их полезными для определенных задач. Во-первых, они используют стандартные протоколы передачи данных, такие как RS-232. Это позволяет установить надежное соединение между компьютером и устройством. Во-вторых, ком порты могут быть использованы для работы с устройствами в реальном времени, такими как считывание данных с некоторых сенсоров или управление подключенными устройствами.
Ком порты также имеют свои недостатки. Они могут быть медленными по сравнению с другими интерфейсами и не могут передавать данные на большие расстояния. Однако, ком порты все еще широко используются во многих областях, где требуется надежное подключение и простота использования.
В заключение, ком порт является важной частью компьютера, которая позволяет подключать различные устройства и обмениваться данными с ними. Он может быть полезен для программистов, инженеров и других специалистов, работающих с различными устройствами и сенсорами.
Подключение устройства через ком порт
Для подключения устройства через ком порт необходимо выполнить несколько шагов:
- Подключите устройство к ком порту компьютера. Устройство может быть подключено с помощью специального кабеля или адаптера, который позволяет подключать различные типы устройств. Удостоверьтесь, что подключение выполнено корректно и кабель надежно зафиксирован.
- Определите номер ком порта. Для работы с ком портом необходимо знать его номер. В операционной системе Windows ком порты обозначаются буквами «COM» и номером (например, COM1, COM2 и т. д.). Номер порта можно найти в настройках системы, диспетчере устройств или в документации к устройству.
- Настройте параметры соединения. Перед началом работы с ком портом необходимо настроить параметры соединения, включая скорость передачи данных (бит в секунду), биты данных, контроль четности и другие параметры. Эти параметры могут зависеть от устройства, с которым вы работаете. Обычно они настраиваются с помощью специальной программы или в настройках операционной системы.
- Напишите программу для работы с ком портом. Для передачи и приема данных через ком порт необходимо написать программу или использовать готовое программное обеспечение. В языке программирования обычно используются специальные функции и библиотеки для работы с ком портом.
- Тестируйте подключение. После настройки программы и ком порта необходимо протестировать подключение. Вы можете отправить и принять некоторые тестовые данные, чтобы убедиться, что все работает корректно. Если возникают проблемы, проверьте соединение, настройки и программный код.
Зная основные шаги подключения устройства через ком порт, вы можете начать работать с различными типами устройств, такими как принтеры, сканеры, модемы,\xa0древовидные структурыи и т. д. Помните, что работа с ком портом требует определенных знаний и опыта в программировании и настройке системы, поэтому будьте готовы к изучению и ознакомлению с документацией.
Установка и настройка драйверов для ком порта
Для работы с ком портом в операционной системе Windows необходимо установить соответствующие драйвера.
1. Подключите устройство, которое будет использоваться через ком порт, к компьютеру. Убедитесь, что устройство включено и должным образом подключено к порту.
2. Откройте меню «Пуск» и выберите «Панель управления».
3. В разделе «Аппаратное и звуковое оборудование» выберите «Устройства и принтеры».
4. Нажмите правой кнопкой мыши на устройстве, связанном с ком портом, и выберите «Свойства».
5. В открывшемся окне перейдите на вкладку «Порты» (или «Подключения» в старых версиях Windows).
6. В списке портов найдите нужный ком порт и запомните его номер.
7. Если драйвера для ком порта не установлены, вам будет предложено установить их автоматически. Если предложение не появилось или вы хотите установить драйвера вручную, щелкните по кнопке «Обновить драйвер».
8. В появившемся окне выберите «Автоматический поиск обновленного программного обеспечения». Операционная система автоматически выполнит поиск драйверов для ком порта.
9. Если драйверы найдены, они будут загружены и установлены автоматически. После установки драйверов перезагрузите компьютер.
10. После перезагрузки ваш ком порт будет готов к использованию. Вы можете проверить его работоспособность, открыв «Устройства и принтеры» и подключив соответствующее устройство.
Важно помнить, что установка драйверов может отличаться в зависимости от конкретной версии операционной системы Windows. Данные шаги представляют общий план действий и могут быть адаптированы к вашей ситуации.